
Servo Improvement Package
Better Absolute Accuracy and Repeatability, Shorter Test Time With New Servo Improvement
- Increase servo positioning accuracy to 0.4 nm (0.016 mInch)* , 1 s
- Achieve higher accuracy and repeatability of the Triple Track, Track Profile, W/R Offset measurements:
5–0.8 nm (0.02–0.03 mInch)**, 1 s - Reduce production test time compared to standard servo – typically saves 3-5 seconds per head, per test location
- Perform longer tests – used to be limited due to the temperature distortion of the roundness of the tracks. Achieved by compensation of changing repeatable runout (RRO) – 1st, 2nd, and 3rd harmonics of rotational frequency at 7200 RPM
- Improve effectiveness of the Adjacent Track Interference test (WATI)
- Format the working areas of the disk once, when media is installed. Re‑formatting is required only when you change the media, or the servo is destroyed.
- Identify the tracks in the working areas by the unique track number
- Write data tracks with one head, and read with another head
- Requires Servo 3 or Servo 4 RWA and Guzik V2002 Spinstand
________________
* All specifications are subject to change.
** Measurement results may vary for different heads. Guzik performed evaluation using Western Digital 7200 RPM, 80 Gbit/In2 head.
Format Disk With Servo Tracks Once, Use the Servo Information With Many Heads
With today’s high track densities, using embedded servo to provide accurate and repeatable positioning is a requirement. Guzik V2002 now supports two modes of servo operation:
- Standard Servo Mode (included in WITE32)
- New Servo Mode (optional, included in the Servo Improvement package)
In the standard servo mode you write servo every time you put a new head on the spinstand. The Erase Servo and Write Servo operations are included in the production sequence, and performed on every track.
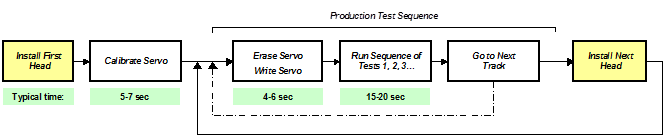
Figure 1: Operational Sequence for Standard Servo Mode
In the new servo mode you write servo onto multiple tracks using the Format Media procedure. This is typically done when you change the media. The Format Media typically takes 5-8 minutes for single test location, plus two minutes per additional test location. For example, for three-zone product configuration (ID, MD, and OD) the Format Media time will be about 9-12 minutes.
Once servo is written, you run the production test for multiple heads. The production test only contains Servo ON operation to enable micropositioning in servo mode and start using the servo.
You need to re-format media only when you change the disk, or the servo is destroyed.
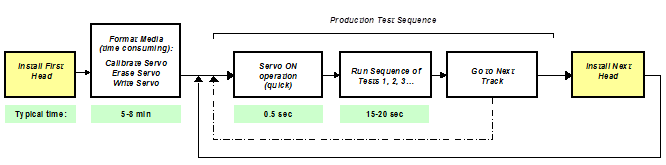
Figure 2: Operational Sequence for New Servo Mode
Improved Servo Accuracy
Because Servo writing is performed once when you change the media, we dedicate more time and apply more advanced algorithms for servo writing and linearization during the Format Media procedure. As a result, the absolute accuracy of servo positioning is higher in the new mode, as compared to the standard mode:
- V2002 Servo Accuracy (standard servo mode): 1.7 nm (0.067 mInch), 1 s
- V2002 Servo Accuracy (new servo mode): 0.4 nm (0.016 mInch), 1 s
The figures below show the servo position error in the standard and the new modes. The servo was written 20 times (radial range 2.8 mm / 110 mInch), and the distortions of the servo position were measured and plotted.
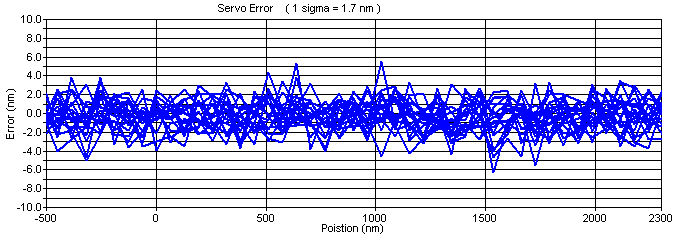
Figure 3: Servo Position Accuracy in Standard Servo Mode
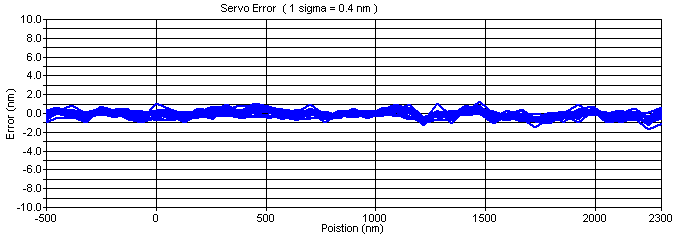
Figure 4: Servo Position Accuracy in New Servo Mode
Accuracy and Repeatability of Head Geometry Measurements
By using the Servo improvement package you achieve better accuracy and repeatability of the head geometry measurements. This includes off-track tests such as Track Profile, Triple Track, W/R Offset, WITE Adjacent Track Interference test. Figure 5 demonstrates the 0.5–0.8 nm (0.02–0.03 mInch) repeatability of the Triple Track test results.
The data was measured using Western Digital 7200 RPM, 80 Gbit/In2 product. The typical production sequence that included the Triple Track test was performed 100 times, and the standard deviation (1s) of the resulting values were calculated.
The repeatability was measured for the following four cases:
- No Servo – the production sequence was configured without servo and ran 100 times.
- Standard Servo – the production sequence was configured to start with Erase Servo and Write Servo operations. In this measurement the servo without improvement package was written in every run, and the Triple Track test was performed once for each written servo. The sequence was repeated 100 times.
- New Servo (1) – the production sequence was configured to start with the Format Media procedure to write the new improved servo. In this measurement the new servo was written in every run, and the Triple Track test was performed once for each written servo. The sequence was repeated 100 times. Compare this result to the Standard Servo result to see the improvement in the new servo accuracy.
- New Servo (2) – the servo was written once, and the production sequence with a Triple Track test was performed 100 times using the same servo. This result shows the repeatability of the Triple Track measurement itself. If you compare this result to the New Servo (1) case, where the servo was re-written on every run, you can see that the new servo does not introduce significant errors due to servo writing process.
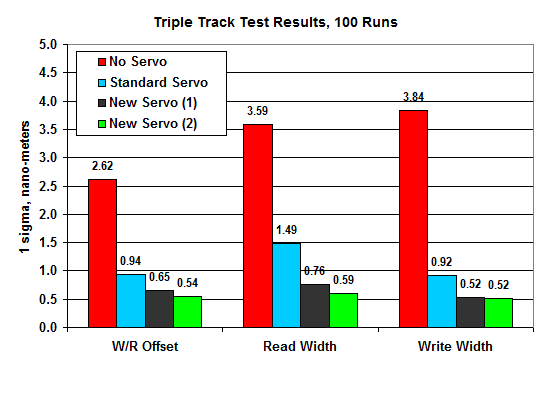
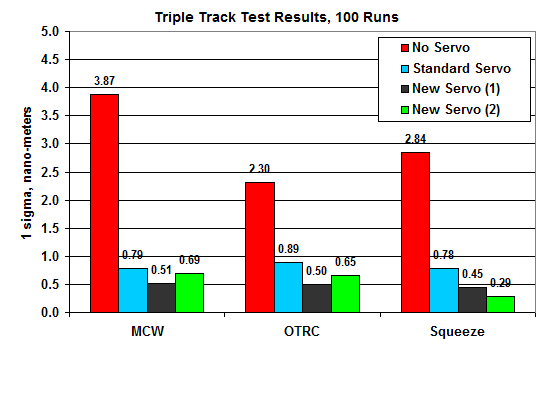
Figure 5: Triple Track Test Results
Production Test Time
Since you do not erase and write servo by every head, the production test time in the new servo mode is shorter than in the standard servo mode. You typically save 3-5 seconds per head per test location, as compared to the standard servo mode.
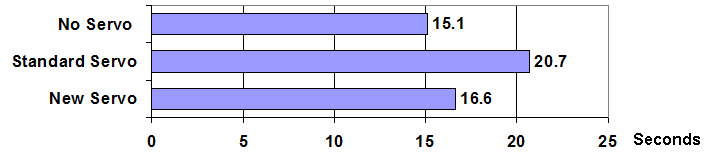
Figure 6: Production Test Time Comparison
Figure 6 above shows the test time comparison for the production test, which consists of one zone and one setup, and includes the following tests:Figure 6: Production Test Time Comparison
- WROffset
- Triple Track
- Parametric
- PWN Asymmetry
- SNR
- Overwrite
- Spectral Integral SNR
The production test was performed using 7200 RPM product, from the WITE32 Production Dashboard.
Compensation of Changing RRO
Spindle motors have certain amount of repeatable run-out (RRO). When RRO is stable, the head writes a signal along some non-circular trajectory, and then reads it back along the same trajectory. Stable RRO does not introduce any error to the measurement. However, after a spinstand stops and starts the spindle, or changes RPM to loading/unloading rotational speed, the spindle RRO starts changing slowly. The process of RRO drifts can be as long as 15-20 minutes after changing the rotational speed, and quite often can reach values as big as 100-200 nm (4-8 mInch).
Servo Improvement package provides a method to compensate for changing RRO. The 1st, the 2nd, and the 3rd harmonics of rotational speed are compensated for 7200 RPM (the 1st and the 2nd harmonics for 15000 RPM). The head will follow the changing trajectory, and will stay on track at all times.
This feature of the Servo Improvement package significantly improves the Track Profile repeatability results, and allows for larger number of iterations and tighter Position Error Signal (PES) tolerances in the multi-revolution write tests such as WATI.
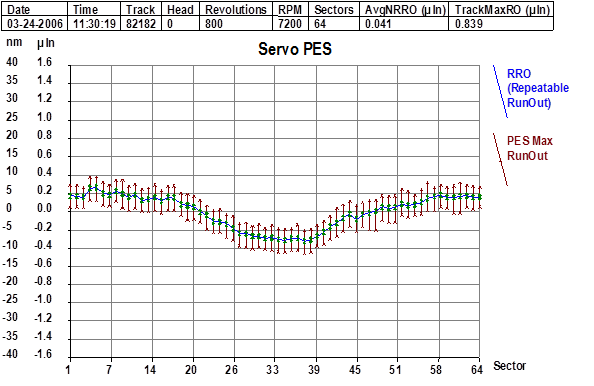
Figure 7: PES Signal in Standard Servo Mode (RRO Compensation is OFF
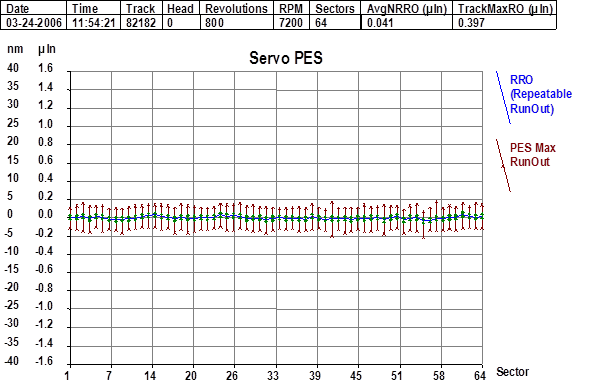
Figure 8: PES Signal with Servo Improvement Package (RRO compensation is ON)
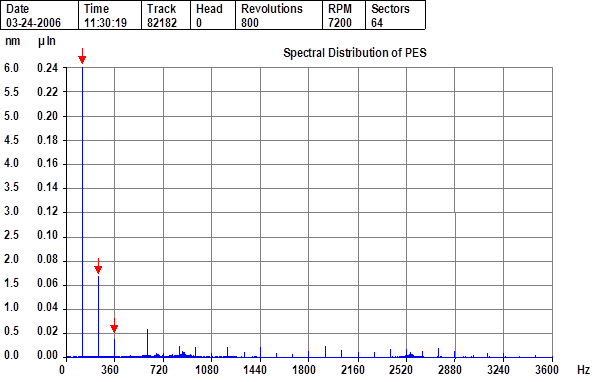
Figure 9: PES Spectrum in Standard Servo Mode (RRO Compensation is OFF)
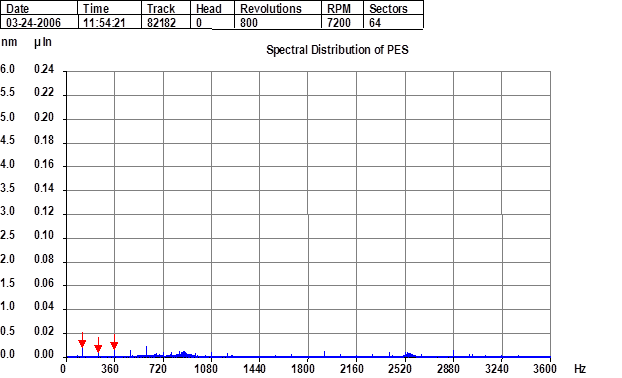
Figure 10: PES Spectrum with Servo Improvement Package (RRO Compensation is ON)
Write Data Tracks With One Head, and Read With Another
Servo Improvement package allows for testing the heads, which have only read element on the slider. This is useful for R&D and pre-production environment when the new read elements have to be tested before integrating them with write elements. The idea of such testing is to write the servo and data
tracks by one head, replace it by the cartridge with the read-only head, and perform testing of the read-only head.
Figure 11 below shows an example of reading the same track by two different heads. The servo and data track was written by one head. The track profile was built using this head (labeled “Read Head 1”). The spinstand was stopped and a different cartridge with the second head was installed. The test system placed the second head over the same track using the pre-written servo, and the read-only track profile was built (labeled “Read Head 2”).
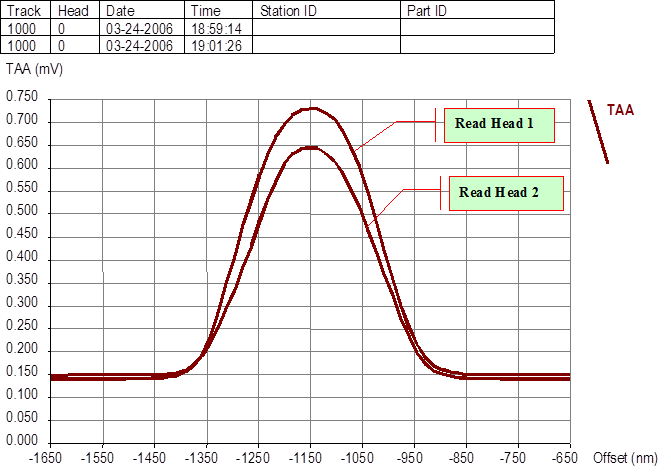
Figure 11: Reading Pre-written Data by Multiple Heads
Previously, Guzik was offering Split Test package for the purpose of testing read-only heads.
The table below shows the key differences between the Servo Improvement package and the Split Test:
| Feature | Servo Improvement Package | Split Test |
| Test location(s) | Multiple | Single |
| RRO compensation | Yes | No |
| Absolute accuracy of servo | 0.4 nm (0.016 mInch), 1 s | 1.7 nm (0.067 mInch), 1 s |
As you can see from the table above, the Servo Improvement package extends the functionality of the Split Test. Guzik recommends using the Servo Improvement package instead of the Split Test.
- Guzik RWA-2000* series with Servo Revision 3 or Servo Revision 4
- Guzik V2002 spinstand
- Spinstand Control Box V2002 with Servo Controller 4 or Servo Controller 5** board
- WITE32 Revision 3.40 or later
- Servo Improvement package Software license. Please contact sales@www.guzik.com to obtain a quotation for the license* It is recommended that the RWA contains Pattern Generator board model PG-4000 (P/N 331120), PG-2002MAX (P/N 324970), or Pattern Generator board model PG‑2002 (P/N 318130, Revision “E” and later). If your Pattern Generator board is one of the older revisions, the Format Media procedure will require more time to complete.
________________
* It is recommended that the RWA contains Pattern Generator board model PG-4000 (P/N 331120), PG-2002MAX (P/N 324970), or Pattern Generator board model PG-2002 (P/N 318130, Revision “E” and later). If your Pattern Generator board is one of the older revisions, the Format Media procedure will require more time to complete
** If your Control Box contains older Servo Controller 3 or Servo Controller 3+ board, please contact sales@www.guzik.com to obtain a quotation for upgrade.
Acknowledgements
Guzik would like to thank Western Digital Corporation for the head and media provided to Guzik for measurements.